2.1 KiB
2.1 KiB
产品参数
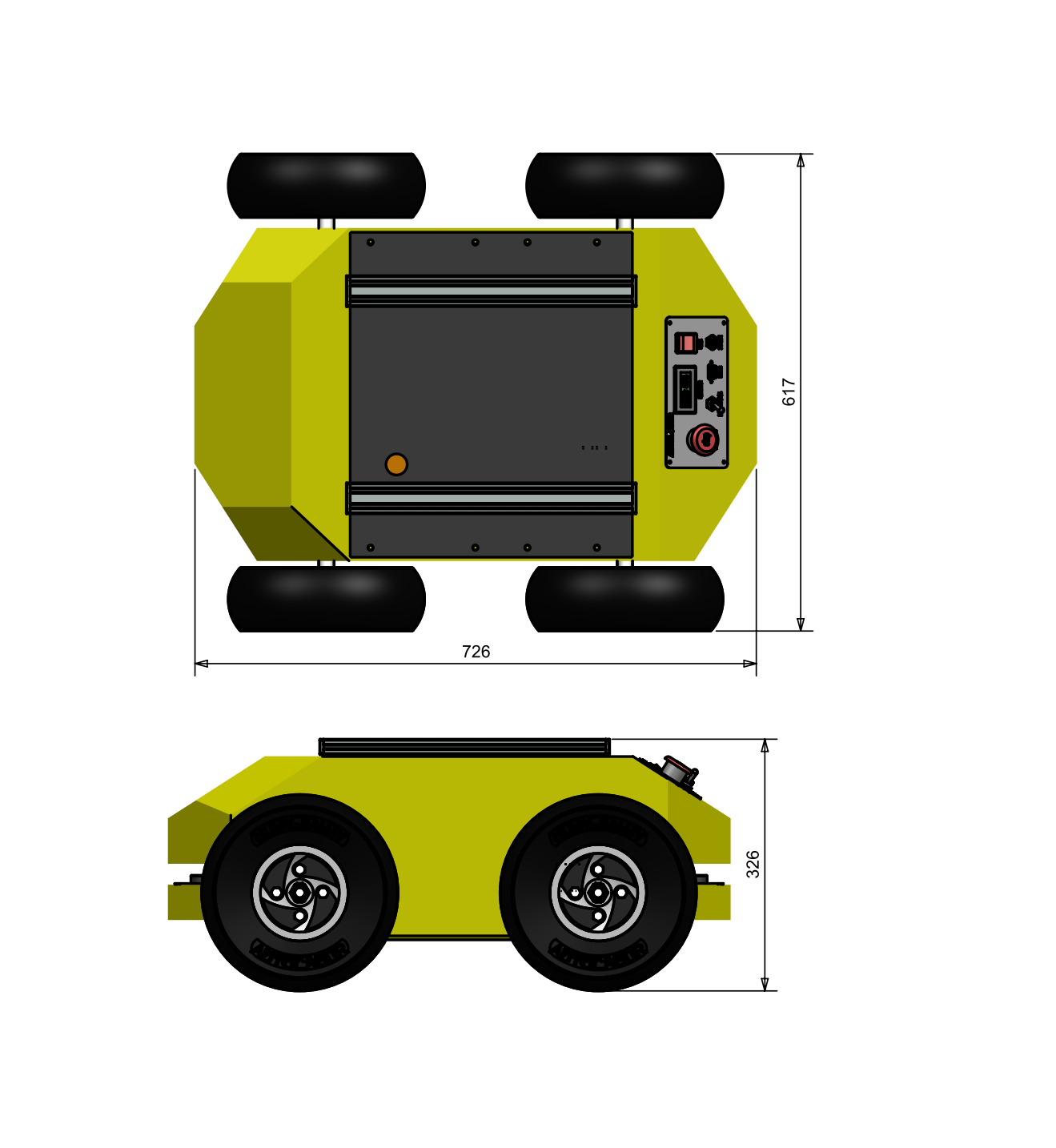
| 尺寸 | 726*617*326mm | 净重 | 40kg |
| 负载 | 50kg | 电池 | 24v 磷酸铁锂电池 |
| 电池容量 | 20AH | 续航时间 | 4h |
| 辅助电源 | 24v | 最大速度 | 0.8m/s |
| 驱动方式 | 四驱 | 转向方式 | 差速转向 |
| 通信接口 | RS232串口 115200bps |
编码器精度 | 物理:400线 逻辑:1600线(四倍频) |
| PID控制频率 | 50Hz | 适用地形 | 全地形 |
| 垂直越障能力 | 8cm | 爬坡能力 | 25° |
| 支持系统 | Windows/Linux | 支持平台 | x86/arm |
| 手柄控制 | 20m | 手柄通讯 | 2.4Ghz |
产品尺寸
控制手柄参数
该手柄有自动休眠功能,长时间不操作,省电模块被激活后自动进入休眠模式,按下START键即可唤醒手柄。
| 参数名称 | 参数内容 |
|---|---|
| 电池 | AAA(7号)电池*2 |
| 使用时间 | 约10小时 |
| 无线频率 | 2.4GHz |
| 接收范围 | 20m |
控制面板使用

控制面板清单:
| 名称 | 个数 | 说明 |
|---|---|---|
| 紧急停止 | 1 | 在紧急情况下请按下该紧急停止按钮 |
| 电源 | 1 | 电源开启关闭按钮 |
| 充电口 | 1 | 为内置电池充电 |
| 电量显示 | 1 | 以百分比的形式显示M1电池电量 |
| 遥控/上位机 | 1 | 切换手柄控制与上位机控制按钮 |
| RS232 | 1 | 使用串口数据线连接下位机与上位机,进行通信 |
熔断式保险或空气开关
当M1意外出现短路、过载的情况时,熔断式保险或空气开关会主动切断电池的回路。
